Titan Encoder¶
Handles the Encoder ports on the Titan.
Note
While the Titan Encoder inputs are accurate on the Titan, with the CAN bus propagation delay, there will be a delay between the actual count and the count read on the VMX. If you require immediate counts plug your encoders into the FlexDIO ports directly on the VMX.
vi |
Attributes |
|---|---|
Encoder |
Titan Encoder initialization |
Read |
Titan Encoder reading |
Read RPM |
Titan Encoder rpm reading |
Reset |
Titan Encoder reset |
TitanENC¶

Is a class that contains the code for reading the encoder ports on the Titan. Has only a HG_LIB output.
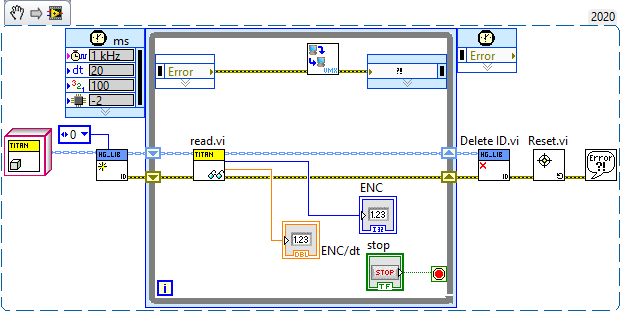
Read¶
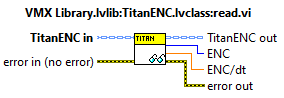
A vi that allows for reading the encoder count from the port specified by the Create ID vi.
Name |
I/O |
Attribute |
|---|---|---|
TitanENC in |
Input |
The input cluster from Create ID |
error in (no error) |
Input |
The error input cluster |
TitanENC out |
Output |
The output cluster to go to Delete ID |
ENC |
Output |
The raw encoder count |
ENC/dt |
Output |
The delta change in encoder count |
error out |
Output |
The error output cluster |
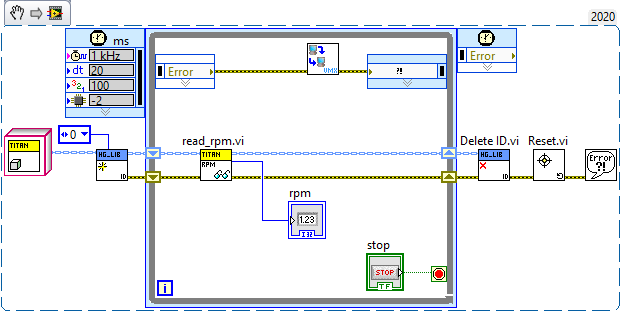
Read_RPM¶
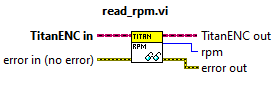
A vi that allows for reading the encoder rpm count from the port specified by the Create ID vi.
Name |
I/O |
Attribute |
|---|---|---|
TitanENC in |
Input |
The input cluster from Create ID |
error in (no error) |
Input |
The error input cluster |
TitanENC out |
Output |
The output cluster to go to Delete ID |
rpm |
Output |
The rpm of the motor reported by the Titan |
error out |
Output |
The error output cluster |
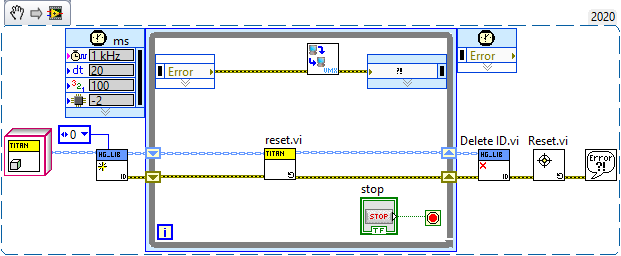
Reset¶
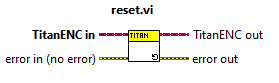
A vi that allows for resetting the encoder count from the port specified by the Create ID vi.
Name |
I/O |
Attribute |
|---|---|---|
TitanENC in |
Input |
The input cluster from Create ID |
error in (no error) |
Input |
The error input cluster |
TitanENC out |
Output |
The output cluster to go to Delete ID |
error out |
Output |
The error output cluster |