IMU / NavX¶
Handles the IMU data from the internal NavX of the VMX.
vi |
Attributes |
|---|---|
IMU |
IMU initialization |
Read |
IMU reading |
Reset Yaw |
IMU reset |
IMU¶

Is a class that contains the code for reading the imu data on the VMX. Has only a HG_LIB output.
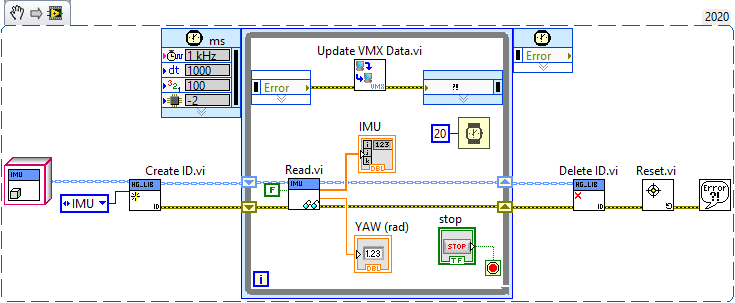
Read¶
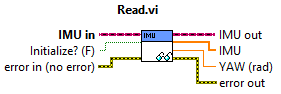
A vi that allows for reading of the imu data on the port specified by the Create ID vi.
Name |
I/O |
Attribute |
|---|---|---|
IMU in |
Input |
The input cluster from Create ID |
Initialize? (F) |
Input |
Initialize the imu or not, default false |
error in (no error) |
Input |
The error input cluster |
Pulse out |
Output |
The output cluster to go to Delete ID |
IMU |
Output |
The output cluster with YAW, PITCH, ROLL |
YAW(rad) |
Output |
The YAW value in radians |
error out |
Output |
The error output cluster |
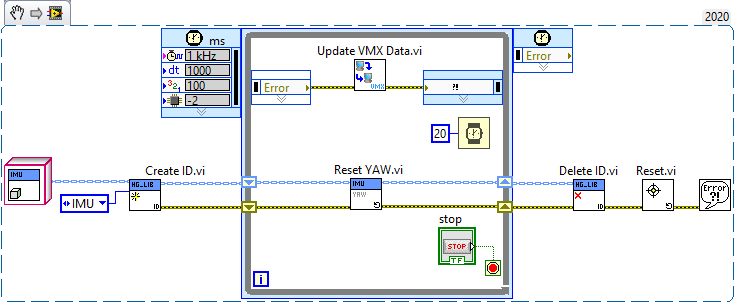
Reset Yaw¶
A vi that allows for resetting of the imu data on the port specified by the Create ID vi.
Name |
I/O |
Attribute |
|---|---|---|
IMU in |
Input |
The input cluster from Create ID |
error in (no error) |
Input |
The error input cluster |
IMU out |
Output |
The output cluster to go to Delete ID |
error out |
Output |
The error output cluster |