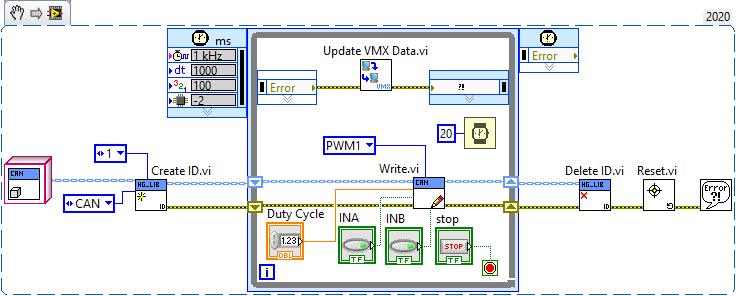
CAN Bus¶
Handles the CAN bus communication on the VMX. Specifically used to control the speed of a motor on the Titan.
vi |
Attributes |
|---|---|
CAN |
CAN bus initialization |
Write |
CAN bus writing |
CAN¶

Is a class that contains the code for setting the motor speed on the Titan using the CAN bus on the VMX. Has only a HG_LIB output.
Read¶
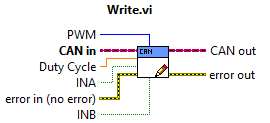
A vi that allows for setting the motor speed from the port specified by the Create ID vi.
Name |
I/O |
Attribute |
|---|---|---|
CAN in |
Input |
The input cluster from Create ID |
PWM |
Input |
Motor to control |
Duty Cycle |
Input |
Speed to set the motor at |
INA |
Input |
One of the Directional registers for motor direction |
INB |
Input |
One of the Directional registers for motor direction |
error in (no error) |
Input |
The error input cluster |
CAN out |
Output |
The output cluster to go to Delete ID |
error out |
Output |
The error output cluster |