RQT¶
What is RQT?¶
RQT is one of the many software frameworks of ROS that developers use to implement various plugins to form a graphical user interface (GUI) for the ROS system. These GUIs can be open as individual windows in rqt making it simple to manage various processes at the same time. Running the ROS image srcript installNoetic.sh includes the rqt tool, there are common plugins already available available such as rqt_image_view for displaying images, rqt_graph for viewing the network of node graphs, and rqt_plot for a visual representation of a 2-D plot.
In the package repository, there is a perspective file that includes GUIs for Dynamic Reconfigure, Image View, and Node Graph plugins. To open this perspective file, refer to the following instructions below.
There are two ways of loading the vmxpi_ros_rqt.perspective file:
RQT GUI
Run
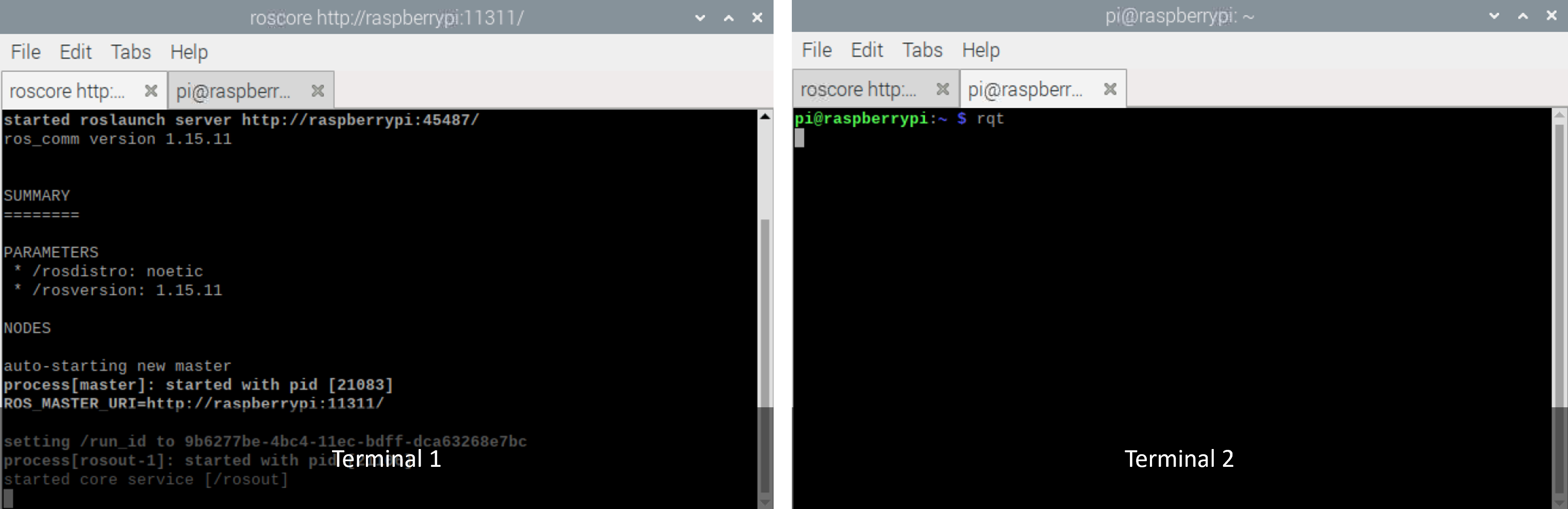
rqtin the command line ensuringroscoreis running in another terminal in the background
rqt
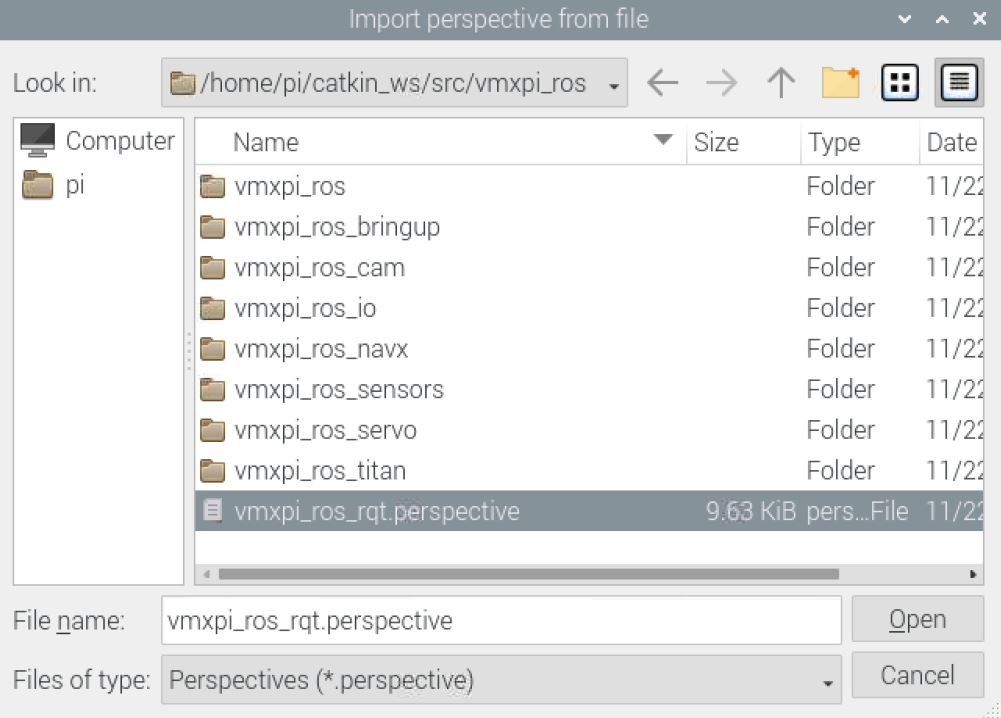
Navigate to the Perspectives tab

Select
Import...from the dropdownNavigate to the location of the
vmxpi_ros_rqt.perspectivefile and open it
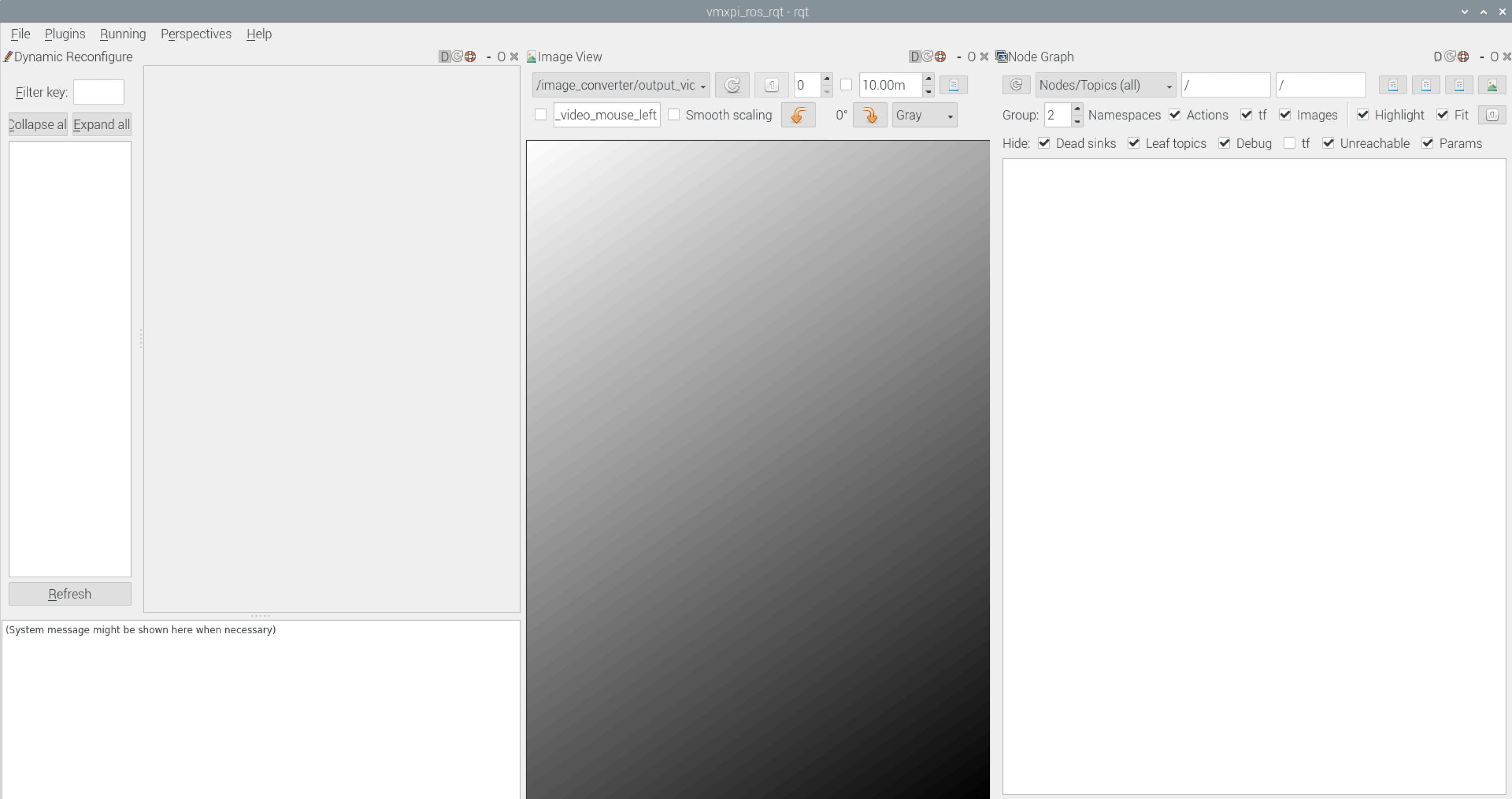
From the dashboard, three windows should appear containing the Dynamic Reconfigure, Image View, and Node Graph GUIs.
From the Command Line
Open a terminal and run
roscore
roscore
Open another terminal and run
rqt --perspective-file "/home/pi/catkin_ws/src/vmxpi_ros/vmxpi_ros_rqt.perspective"
After running the command, the rqt dashboard will appear with the GUIs of the same three plugins already opened as dockable windows.