Running the Package¶
In a new terminal, run roscore
roscore
The following should appear:
... logging to /home/pi/.ros/log/634b1d0a-4664-11ec-90e3-dca63268e7bc/roslaunch-raspberrypi-18104.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://raspberrypi:38727/
ros_comm version 1.15.11
SUMMARY
========
PARAMETERS
* /rosdistro: noetic
* /rosversion: 1.15.11
NODES
auto-starting new master
process[master]: started with pid [18113]
ROS_MASTER_URI=http://raspberrypi:11311/
setting /run_id to 634b1d0a-4664-11ec-90e3-dca63268e7bc
process[rosout-1]: started with pid [18136]
started core service [/rosout]
roscore is the first command that should be run to allow for ROS nodes to communicate. The command essentially prepares your system by launching the pre-requisite nodes and programs needed for a ROS system.
Tip
Run rosclean check to check the disk usage of ROS log files. If disk usage >1GB, run rosclean purge to clear existing ROS log files.
In another terminal, run
sudo suto run commands as root.
sudo su
Running a command with the sudo prefix is required for commands that require superuser privileges.
Caution
Switching to the superuser (root) can be dangerous, it grants access to “super powers” like the ability to modify or delete any file in any directory on the system, hence one should be careful with the commands run under the root account.
As the root user run:
echo "source /opt/ros/noetic/setup.bash" >> ~/.profile
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
echo "source /home/pi/catkin_ws/devel/setup.bash" >> ~/.profile
echo "source /home/pi/catkin_ws/devel/setup.bash" >> ~/.bashrc
Close the root terminal and reopen it. Navigate to
cd catkin_ws/srcand runsudo suonce again.
cd catkin_ws/src
sudo su
Now, run the following command to start the nodes in the launch file.
roslaunch vmxpi_ros_bringup wrapper.launch
Configuring the Launch File¶
Navigate to the launch file directory in the file explorer and open the wrapper.launch file.
cd /home/pi/catkin_ws/src/vmxpi_ros/vmxpi_ros_bringup/launch
nano wrapper.launch
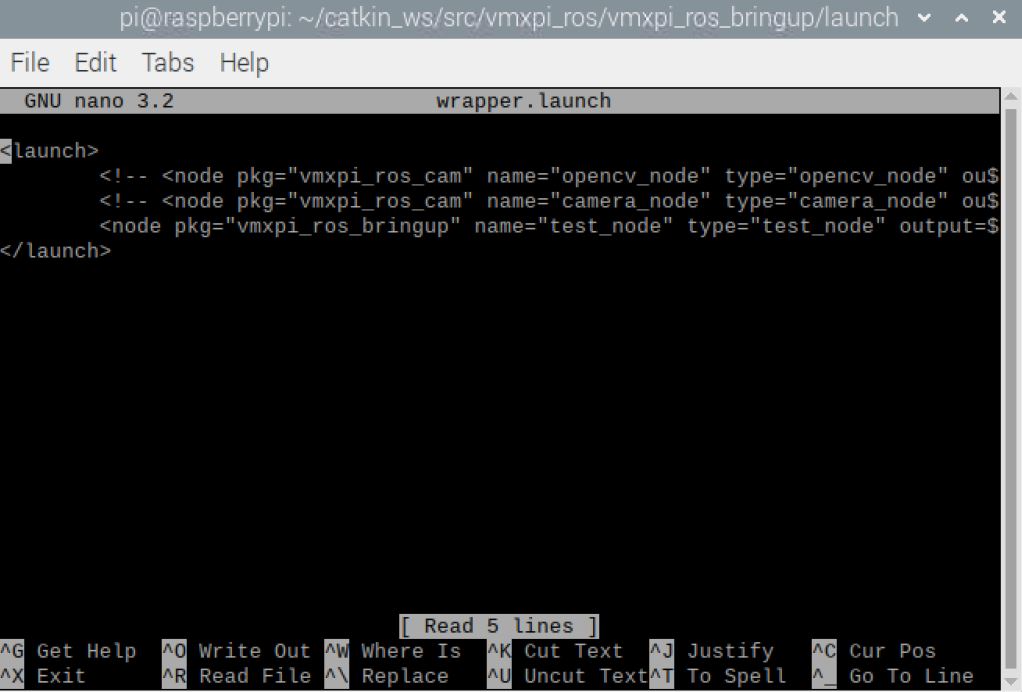
From the image above, there are three nodes in the xml launch file. The camera_node and the opencv_node are both commented out using the xml syntax <!-- Comment -->. Remove these tags to have these nodes run when the launch file is called, or add them when not in use to save resources.
Tip
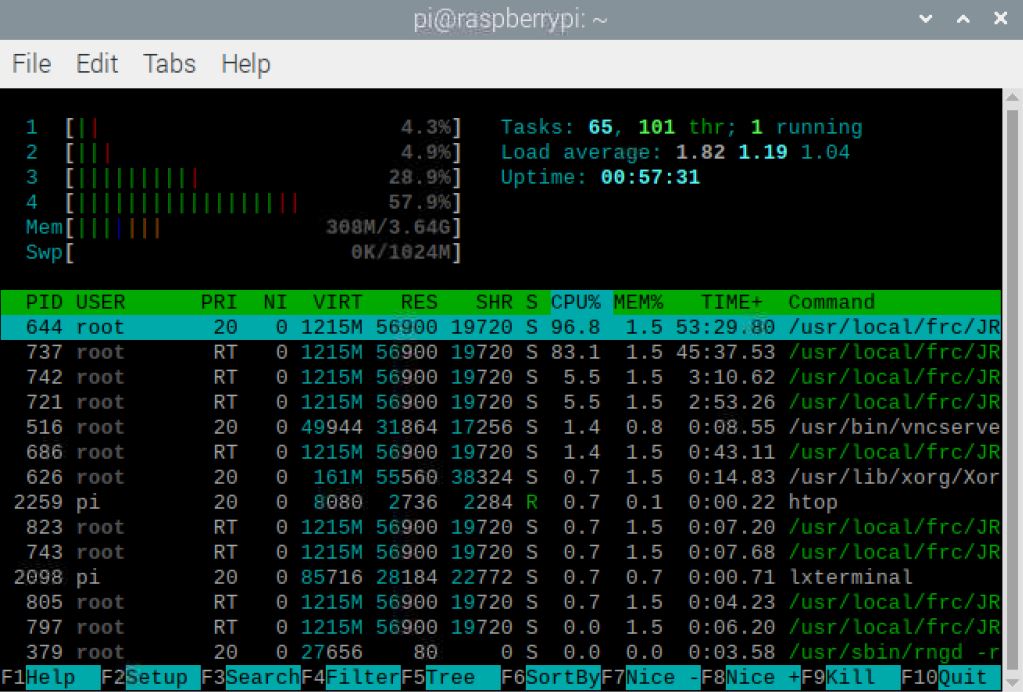
Observe the resource usage by running htop.