ROS Setup¶
Installing ROS Manually¶
Open a terminal window and run the installNoetic.sh script to install ROS Noetic. For more information, visit ROS Noetic.
./installNoetic.sh
Note
Running the installNoetic.sh script takes approximately 3 hours, this includes most of the required tools and dependencies needed for the ROS Package, however this does not include catkin-tools.
To install the required catkin-tools, run the following command:
sudo apt install python3-catkin-tools python3-osrf-pycommon
Using the ROS Image¶
To get started, navigate to the ROS Image and download the ROSImage.zip file. Unzip the downloaded zip file and refer to the section on flashing image files to an SD card here.
Note
The ROSImage file includes all the required tools and dependencies needed for the ROS Package, however this will require approximately 4.8Gb of disk space.
Insert the SD card into the VMX-pi and continue with the instructions below.
Creating a ROS Workspace¶
Create a directory
catkin_wsby runningmkdir -p ~/catkin_ws/src, preferrably in/home/pi.
mkdir -p ~/catkin_ws/src
Then
cd catkin_wsand runcatkin initto initialize the workspace environment.
cd catkin_ws
catkin init
Next, run
catkin build.
catkin build
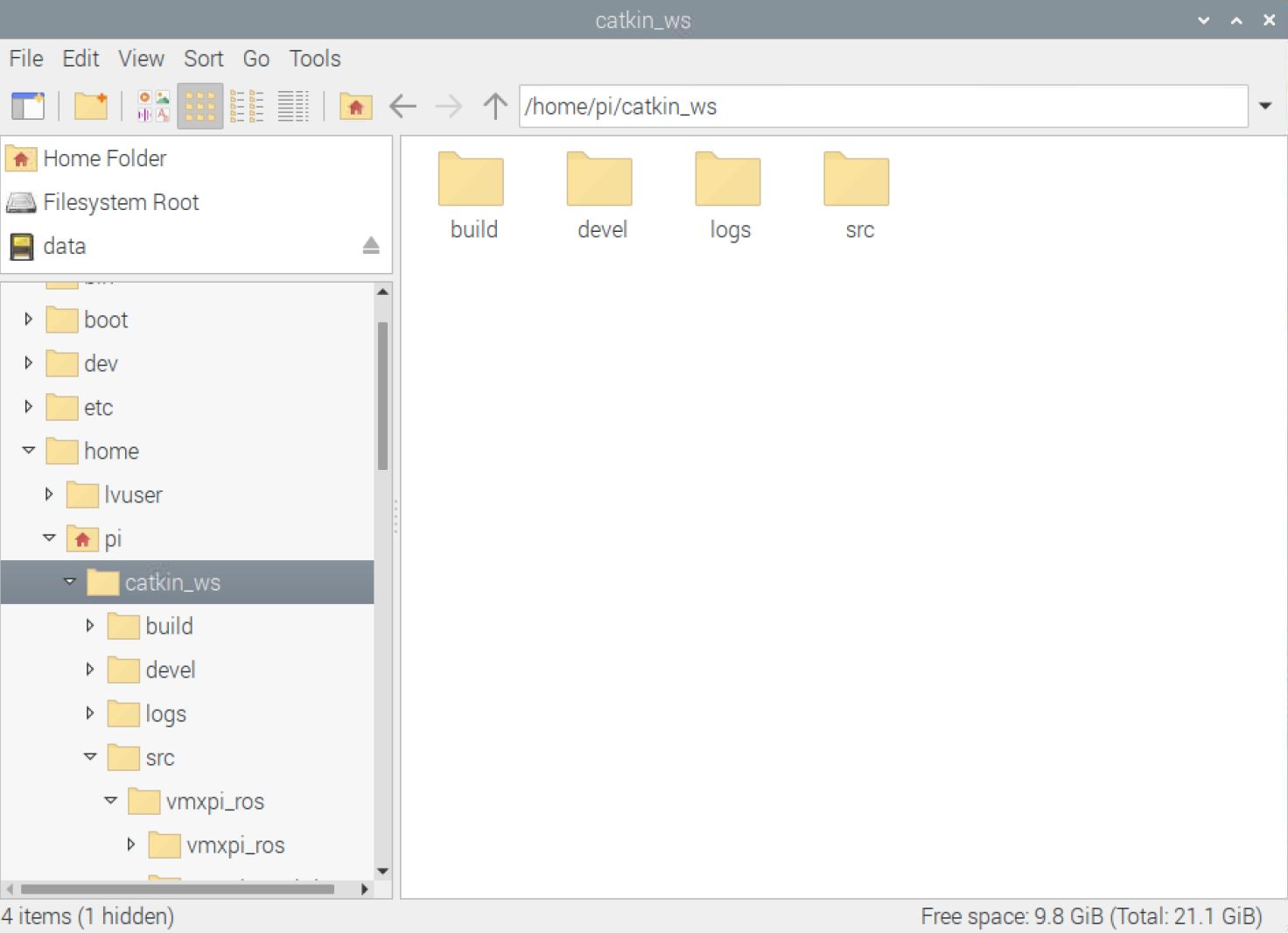
This will create two additional build and devel folders in the catkin_ws directory.
Now clone the VMX-ROS repo into the
srcfolder.
git clone https://github.com/studica/VMX-ROS.git
Lastly, run
catkin buildonce again to build the newly cloned repository in the catkin workspace.
catkin build -cs