Configuring the ROS Environment¶
Permanently source the setup.bash files by running the following:
echo "source /opt/ros/noetic/setup.bash" >> ~/.profile
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
echo "source /home/pi/catkin_ws/devel/setup.bash" >> ~/.profile
echo "source /home/pi/catkin_ws/devel/setup.bash" >> ~/.bashrc
Close the terminal and open a new one.
Navigate to the work space
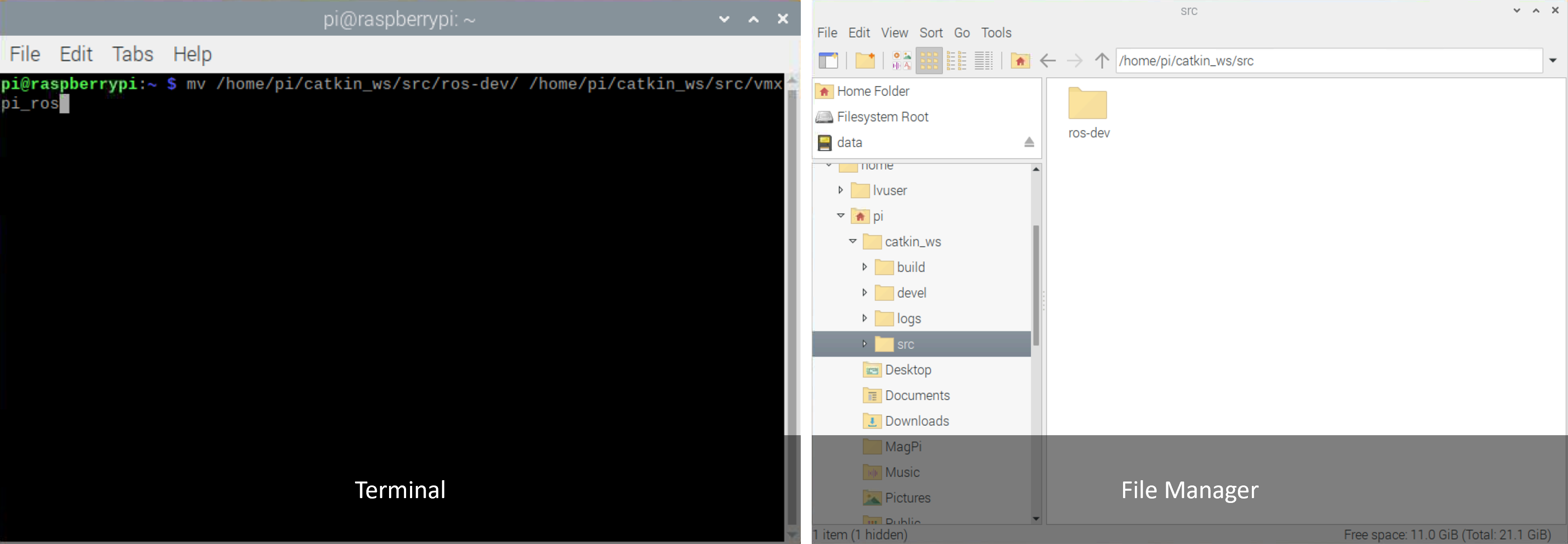
cd catkin_ws/srcChange the name of the
VMX-ROSfolder tovmxpi_ros
mv /home/pi/catkin_ws/src/VMX-ROS/ /home/pi/catkin_ws/src/vmxpi_ros
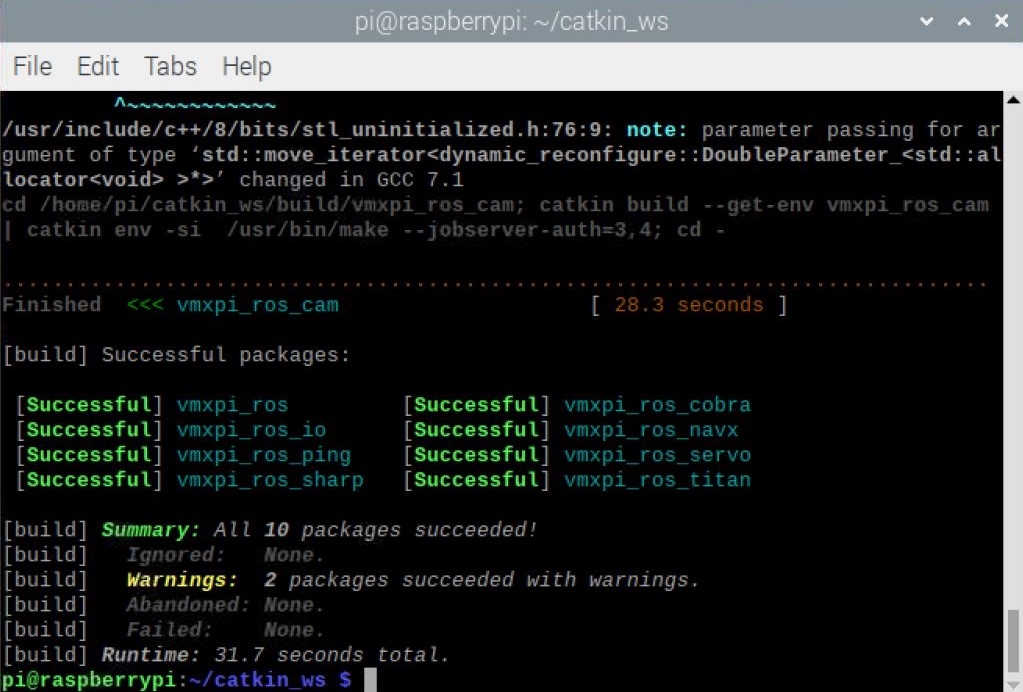
To build the packages run
catkin build -cs. Note, this may take a while as the command builds all the packages in the catkin workspace.
catkin build -cs
Note
This process may take a couple minutes if running for the first time.
With everything built, you can begin running the node.