Services and Clients¶
Writing the Service Node¶
For the purposes of this demonstration we will use the NavX’s ROS Library for reference.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 | //Include the NavX Library #include "navX_ros_wrapper.h" bool navXROSWrapper::GetUpdateRate(vmxpi_ros::IntRes::Request &req, vmxpi_ros::IntRes::Response &res) { res.data = ahrs->GetActualUpdateRate(); return true; } int main(int argc, char **argv) { system("/usr/local/frc/bin/frcKillRobot.sh"); //Terminal call to kill the robot manager used for WPILib before running the executable. ros::init(argc, argv, "update_rate_server"); ros::NodeHandle nh; ros::ServiceServer update_rate = nh.advertiseService("get_update_rate", &navXROSWrapper::GetUpdateRate); ros::spin(); return 0; } |
Explaining the Code¶
Let’s go over each section of the code.
#include "navX_ros_wrapper.h"
navX_ros_wrapper.h is the header for Studica’s NavX sensor ROS library.
bool navXROSWrapper::GetUpdateRate(vmxpi_ros::IntRes::Request &req, vmxpi_ros::IntRes::Response &res)
This function provides the service for obtataining the update rate. From the parameters passed, we can observe that the request and respose is of service type IntRes that is defined in the IntRes.srv file located in the srv folder of vmxpi_ros.
To declare more services, run:
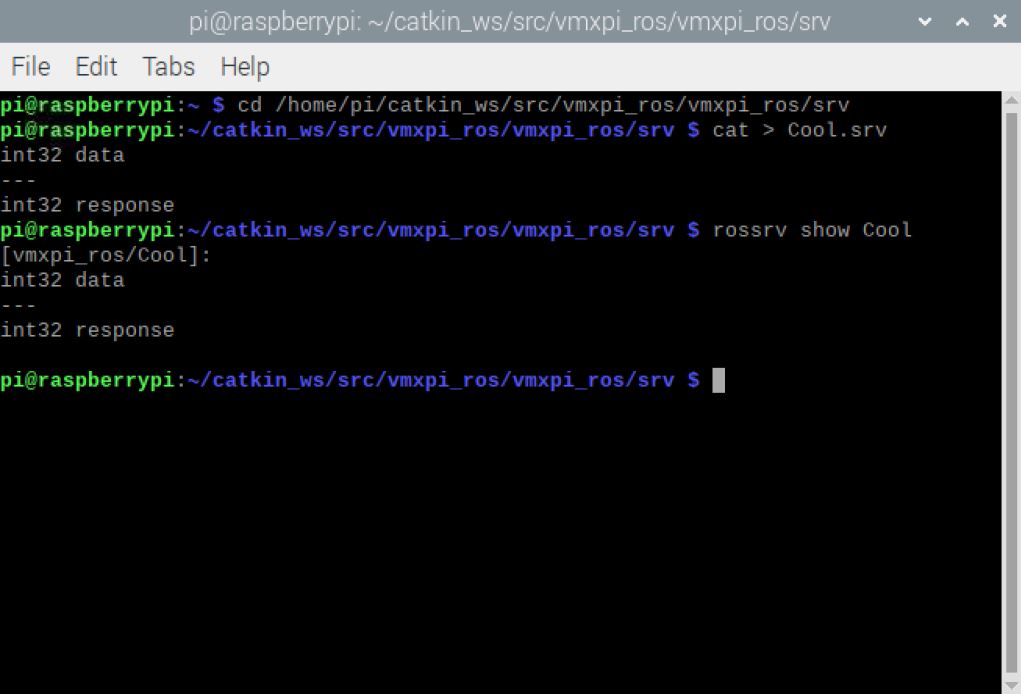
cd /home/pi/catkin_ws/src/vmxpi_ros/vmxpi_ros/srv
cat > [Service Name].srv
Enter the request and response types separated by a --- line, for example:
int32 data
---
int32 response
Press Ctrl-D to save and exit the text file.
Confirm the creation of the .srv file by running:
rossrv show [Service Name]
Also add the newly created .srv file to the add_service_files in CMakeLists.txt as such:
## Generate services in the 'srv' folder
add_service_files(
FILES
Int.srv
IntRes.srv
Float.srv
FloatRes.srv
MotorSpeed.srv
StopMode.srv
StringRes.srv
[Service Name].srv //New service file
)
Below is an example of running the above commands:
Note
For more information on creating .srv service types, visit the Creating a ROS Msg and Srv tutorial.
{
res.data = ahrs->GetActualUpdateRate();
return true;
}
Here the GetActualUpdateRate() accessor method included in the navX_ros_wrapper.h header is stored in the response variable and the service returns true.
ros::ServiceServer update_rate = nh.advertiseService("get_update_rate", &navXROSWrapper::GetUpdateRate);
The service is created and advertised over ROS.
Writing the Client Node¶
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 | //Include the NavX Library #include "navX_ros_wrapper.h" int main(int argc, char **argv) { system("/usr/local/frc/bin/frcKillRobot.sh"); //Terminal call to kill the robot manager used for WPILib before running the executable. ros::init(argc, argv, "update_rate_client"); ros::NodeHandle nh; ros::ServiceClient update_rate_client = nh.serviceClient<vmxpi_ros::IntRes>("get_update_rate"); vmxpi_ros::IntRes srv; if (update_rate_client.call(srv)); { ROS_INFO("Update Rate: %ld", (long int)srv.response.data); } else { ROS_ERROR("Failed to call service get_update_rate"); } return 0; } |
Explaining the Code¶
Let’s go over each section of the code.
Note
Lines that have already been explained above will be ignored.
ros::ServiceClient update_rate_client = nh.serviceClient<vmxpi_ros::IntRes>("get_update_rate");
This creates the get_update_rate client, which will be used to call the service later.
vmxpi_ros::IntRes srv;
Since we are only receiving a response from the service, there is no need to stuff srv with information in its request member.
update_rate_client.call(srv);
This is where the service is called, if the call succeeds a value of true is returned and srv.response will contain a valid value, otherwise false is returned meaning the value of srv.response will be invalid.